manif documentation¶
manif is a Lie theory library for state-estimation targeted at robotics applications. It is developed as a header-only C++11 library with Python 3 wrappers.
At the moment, it provides the groups:
ℝ(n): Euclidean space with addition.
SO(2): rotations in the plane.
SE(2): rigid motion (rotation and translation) in the plane.
SO(3): rotations in 3D space.
SE(3): rigid motion (rotation and translation) in 3D space.
SE_2(3): extended pose (rotation, translation and velocity) in 3D space, introduced (to the best of knowledge) in this paper. NOTE: The implementation here differs slightly from the developments in the paper.
SGal(3): The Special Galilean group (rotation, translation, velocity and time) in 3D space, described in these papers [1] & [2].
Bundle<>: allows manipulating a manifold bundle as a single Lie group. Referred to as a composite manifold in Section IV of the reference paper.
Other Lie groups can and will be added, contributions are welcome.
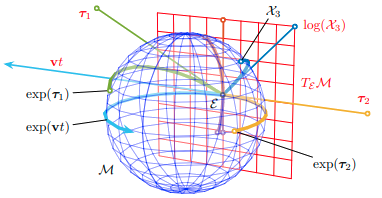
manif is based on the mathematical presentation of the Lie theory available in this paper. We recommend every user of manif to read the paper (17 pages) before starting to use the library. The paper offers a comprehensive yet accessible introduction to Lie theory, tailored specifically for roboticists. By presenting the material in a simplified manner, it lowers the barrier to entry for those interested in developing rigorous and elegant algorithms for state estimation, control, learning, and possibly more. This approach ensures that even readers without an advanced mathematical background can grasp the foundational concepts and apply them effectively in robotics.
In this documentation¶
Start here with an hands-on introduction to manif for new users, guiding you through installation and using manif in your project.
Step-by-step guides covering key operations and common tasks.
Technical information.
Discussion and clarification of key topics.